Miks on CNC-mehaaniline töötlemine robootikatööstuse jaoks kriitilise tähtsusega?
Aeg lugemiseks: 5 min

Roboti käed
Tänapäeval tundub, et robotid on kõikjal – töötavad filmides, lennujaamades, toidutootmises ja isegi tehastes, mis ehitavad teisi roboteid.Üks peamisi põhjusi, miks robotid on nii paljulubavad, on see, et neid saab kujundada erinevatel eesmärkidel ja seega on neil täiesti erinevad funktsioonid.Proleanhubil on aastatepikkune kogemus robotite töötlemisel ja valmistamisel.See ajaveeb tõlgendab CNC-töötluse tähendust ja rakendusi robootikatööstuses.Kui teil on tootmisvajadusi, võtke julgelt ühendustvõtke ühendust meie inseneridegatasuta hinnapakkumise saamiseks.
CNC-mehaaniline töötlemine on kohandatud robotitele
CNC-mehaaniline töötlemine võib toota osi väga kiire teostusajaga.Kui olete 3D-mudeli ette valmistanud, saab tootja alustada CNC-tootmise märgistamisprotsessi ja paralleelselt ka toorainet osta.CNC-töötluse abil saab toota roboti komponente kiireks kasutuselevõtuks, mis võimaldab prototüüpide kiiret iteratsiooni ja kohandatud roboti osade kiiret tarnimist konkreetsete rakenduste jaoks.
Teine CNC-töötluse eelis on seevõimalus valmistada osi täpselt vastavalt spetsifikatsioonile.See tootmistäpsus on eriti oluline robootika jaoks, kus mõõtmete täpsus on suure jõudlusega robotite ehitamisel võtmetähtsusega.Täppis-CNC-mehaaniline töötlemine suudab säilitada ranged tolerantsid +/- 0,015 mm.
Pinnaviimistlus on veel üks põhjus, miks kasutada robotkomponentide tootmiseks CNC-töötlust.Interakteeruvate osade hõõrdumine peab olema väike ja täppis-CNC-töötlemine võib toota osi, mille pinnakaredus on kuni Ra 0,8 μm ja isegi madalam pärast töötlemist, näiteks poleerimist.Seevastu survevalu (enne mis tahes viimistlusprotsessi) annab tavaliselt pinna kareduse, mis on lähemal kui 5 μm.Metallist 3D-printimine annab palju karedama pinnaviimistluse.
Lõpuksrobotis kasutatud materjali tüüp sobib ideaalselt CNC-töötluseks.Robotid peavad suutma esemeid stabiilselt liigutada ja tõsta, mis nõuab tugevaid ja kõvasid materjale.Need vajalikud omadused saavutatakse kõige paremini teatud metallide ja plastide töötlemisel, nagu on kirjeldatud allpool jaotises Materjalid.Lisaks kasutatakse roboteid sageli eriotstarbelistel eesmärkidel või väikestes tootmistsüklites, mis muudab CNC-töötluse roboti komponentide jaoks loomulikuks valikuks.
Robotiosade tüübid, mis on valmistatud CNC-töötlusega
Nii paljude võimalike funktsioonidega on arenenud palju erinevat tüüpi roboteid.Tavaliselt kasutatakse mõnda peamist tüüpi roboteid.
Liigendatud robotidneil on üks käsi, millel on mitu liigest, mida paljud inimesed on varem näinud.
Samuti on olemasSCARA (selektiivse vastavusega liigendatud robotkäevarre) robotid,mis suudab asju liigutada kahe paralleelse tasandi vahel.SCARA-l on kõrge vertikaalne jäikus, kuna need liiguvad horisontaalselt.
Delta robotidon allosas paiknevate liigenditega, mis hoiab käe kerge ja suudab kiiresti liikuda.
Pukk- või Descartes'i robotidon lineaarsed ajamid, mis liiguvad üksteise suhtes 90 kraadi.
Kõigil neil robotitel on erinev konstruktsioon ja erinev rakendus, kuid tavaliselt koosneb robotist neli põhikomponenti.
1) robotkäsi
2) lõpp-efektor
3) mootorid
4) kohandatud klambrid ja kinnitused
1 Robotkäsi
Robotkäed on nii kuju kui funktsiooni poolest väga erinevad, seega saab kasutada palju erinevaid komponente.Üks ühine joon on aga nende võime esemeid liigutada või nendega operatsioone teha ning robotkäe erinevad osad on isegi meie endi järgi nime saanud: õla-, küünarnuki- ja randmeliigesed pöörlevad ja juhivad osade liikumist. vahel.
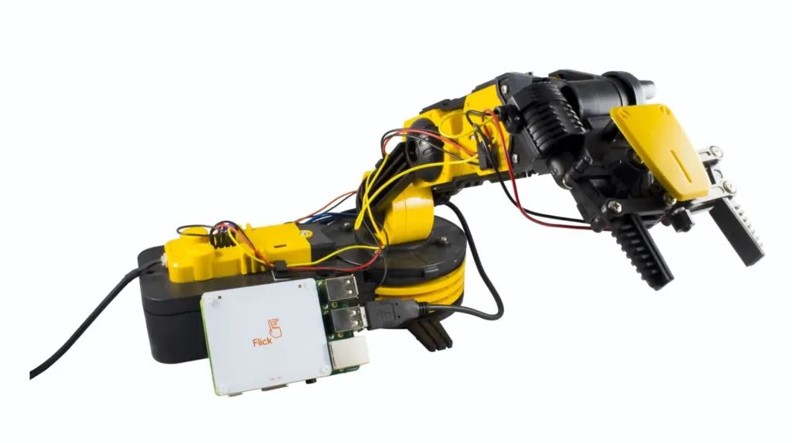
Roboti käsi
Robotikäte konstruktsioonikomponendid peavad olema kõvad ja tugevad, et nad saaksid esemeid tõsta või jõudu rakendada.Nende nõuete täitmiseks kasutatavate materjalide (teras, alumiinium ja mõned plastid) tõttu on CNC-töötlus õige valik.Väiksemaid komponente, nagu hammasrattad või laagrid liigendites või õla ümber oleva korpuse osi, saab samuti töödelda CNC-ga.
2 Lõppjõud
Lõpp-efektor onmanusmis kinnitub roboti käe otsa.Lõppefektid võimaldavad teil kohandada oma roboti funktsionaalsust erinevate toimingute jaoks, ilma et peaksite ehitama täiesti uut robotit.Need võivad olla haaratsid, haaratsid, vaakumid või iminapad.Nendel lõppseadmetel on tavaliselt metallist (tavaliselt alumiiniumist) valmistatud CNC-töödeldud komponendid (materjali valiku kohta lisateavet hiljem).Üks neist komponentidest on püsivalt kinnitatud roboti käe otsa.Tegelik haarats, iminapp või muu lõpp-efektor (või otstöörite hulk) sobib sellesse komponenti, nii et seda saab juhtida robotkäe abil.See kahe erineva komponendiga seadistus muudab erinevate lõpp-efektide vahetamise lihtsamaks, nii et robotit saab kohandada erinevate rakendustega.Seda näete alloleval diagrammil, kus roboti funktsionaalsust saab hõlpsasti ümber lülitada, vahetades välja lõpp-efektid.
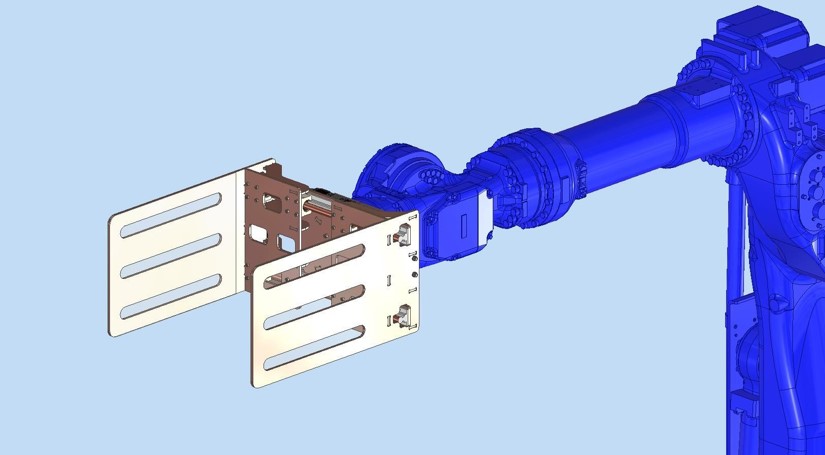
Lõppjõud: Karbi haarats
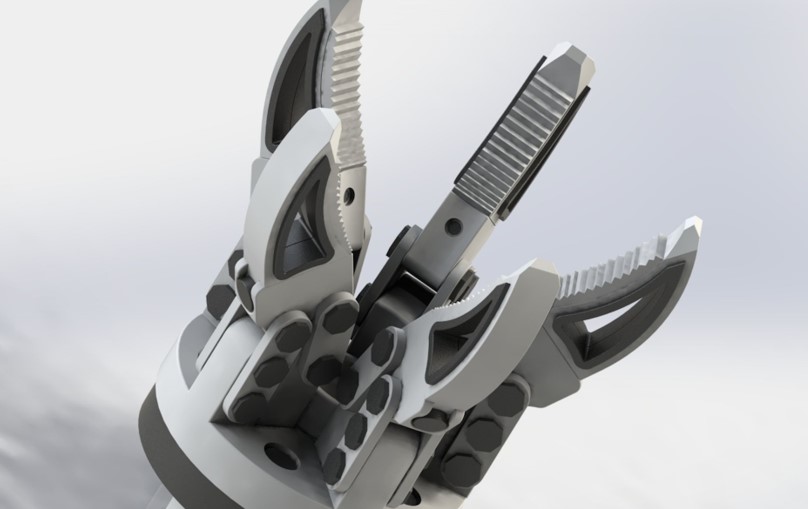
Lõppjõud: 5-lõualine manipulaator
3 mootorit
Iga robot vajab käte ja liigeste liikumise juhtimiseks mootoreid.Mootorid ise on palju liikuvaid osi, millest paljusid saab CNC-ga töödelda.Tavaliselt on mootori töödeldud korpus, töödeldud kronstein, mida kasutatakse selle kinnitamiseks roboti käe külge, ning isegi laagrid ja võllid sageli CNC-töödeldud.Võllid saab töödelda treipingil läbimõõdu vähendamiseks või freespinkil, et lisada selliseid funktsioone nagu võtmed või pilud.Lõpuks saab hammasrattaid, mis kannavad mootori liikumist üle roboti liigestele või muudele osadele, CNC-töötlemisel freesimise, EDM-i või hoobimismasinatega.

Servomootorid roboti liikumise toiteks
4 kohandatud rakistid ja kinnitusdetailid
Kuigi see ei ole osa robotist, nõuab enamik roboti toiminguid kohandatud rakise ja kinnitusvahendeid.Võib-olla vajate kinnitust, mis hoiab osa paigal, kuni robot selle osa kallal töötab.Samuti saate kinnituste abil detaili ükshaaval täpselt positsioneerida, mis on sageli vajalik, et robot detaili üles võtaks või maha paneks.Kuna need on sageli ühekordsed kohandatud osad, on CNC-mehaaniline töötlemine ideaalne kinnitamiseks.Teostusajad on lühikesed ja CNC-mehaaniline töötlemine on sageli hõlpsasti teostatav põhimaterjali, tavaliselt alumiiniumi, tükiga.
Kokkuvõttes
CNC-mehaaniline töötlemine on olnud robootikatööstuse kiire kasvu jaoks oluline.See on suur eelis kiire tootmise, kõrge kvaliteedi ja kõrge pinnaviimistluse osas robotiosade valmistamisel.Roboti tootmisprotsessis kasutatakse CNC-töötlust sageli nelja osa jaoks: robotkäed, lõpp-efektid, mootorid ning kohandatud kinnitused ja kinnitused.See ajaveeb kirjeldab CNC-töötluse tähtsust robootikatööstusele ja rakendusstsenaariume.Kui teil on CNC-töötlusvajadused, saate seda tehakülastage meie CNC teeninduslehte or laadige üles oma CAD-failidotse, et saada uusim pakkumine.
Postitusaeg: mai-09-2022